
■ジャイロコンパス
ジャイロコンパスの2大特性とは何か。各々説明せよ。
X・Y・Z軸の周りを自由に回転できるようにしたこまを、3軸の自由をもつといい、ジャイロスコープとよんでいる。
ジャイロスコープには重要な二つの特性がある。
・方向保持性(回転惰性)
ジャイロの回転軸は空間に対して一定方向を保持し続ける性質。ジャイロを高速度で回転させると、他から回転軸の方向を変えようとする力(トルクtorque)を受けない限り、ジャイロ軸が絶対空間の一点をさし続ける性質。
・プレセッションの性質
回転軸に力を加えると、普通の物体と異なり力と直角の方向に軸の旋回が起こる性質。
高速度で回転しているジャイロに、その軸と一致しないトルクが作用すると、ジャイロ軸はその方向に向きを変えずに、新たに加えられたトルクの回転ベクトルの方向とジャイロのもつ回転ベクトルとが一致するように近道をとって軸の向きを変える性質。
ジャイロコンパスの2つの形式をあげ,その違い(利点、欠点)ダンピング方式を述べよ。
・スペリー系ジャイロコンパス
東京計器TG8000/8500
ジャイロ球の重心に働くトルクによってジャイロ軸を振揺させ、ピックオフから電気信号を用いてジャイロ球に追従・振揺させる。
ジャイロ球にはジャイロが1つだけ入っており、容器内の液体に浮かんでいる。その上端からサスペンションワイヤ(懸吊線)によって吊り下げられている。サスペンションワイヤの下端はジャイロ球の重心よりも上の位置でジャイロ球と結合されている。
このジャイロの指北端を東に向け、水平にして起動すれば、地盤傾斜の影響によって指北端は上昇、ジャイロ球の重心は吊り下げ位置よりも下にあるので水平軸回りに右回りのトルクが発生する。このトルクによりジャイロ軸は西側に向く。
また、ジャイロ軸は北側に向かって右回転しており、ジャイロのベクトルは指北端側へ向く。よってこれらのベクトルを合成すれば指北端が西側へプレセッションする。また、指北端から西側に達してからは逆方向へプレセッションし、この動作を繰り返してジャイロ軸は北を中心に振揺する。
・アンシューツ系ジャイロコンパス
横河電機CMZ900
ジャイロコンパスの転輪球内部には2個のジャイロロータが高速で回転している。
これらのジャイロロータは船体動揺・振動による誤差を打ち消しあうように組み合わせており、非常に高い指北精度を得ることができる。指北原理は右回転する大きなジャイロが入っているものと同様である。
ジャイロ球の重心は浮心位置よりも少し下方で、重心に作用するトルクによって指北作用を得ている。
ジャイロの指北端を東に向け水平にして起動すれば地盤傾斜の影響により、指北端は上昇し、ジャイロ軸NSはN’S’となり、重心はGからG’に移動する。
重力はG’をGに戻そうとしてトルクが働き、このトルクによるベクトルはジャイロの西側へ向く。また、このジャイロは北に向かって右回転であるので、ベクトルは指北端の方向となる。
これらのベクトルを合成すれば、スペリー系と同様に指北端を左方向へプレセッションさせることができる。
ジャイロコンパスの指北原理を説明せよ
回転惰性とプレセッションを利用している。フリージャイロに錘をつけ、その重力を利用している。ジャイロ軸に錘をつけると、ジャイロ軸の傾きによって錘の重力の方向が変わる。ジャイロ軸が上がった場合、重力によりG方向に力が働き、ジャイロ軸を押し下げる力Fが働く。これにより垂直軸を中心とした時計回りのプレセッションが生じる。
・赤道でフリージャイロの指北端を東にして水平に置く
・微笑時間経過すると、自転により軸は傾き、フリージャイロの錘の重力は真下より若干傾いた方向に働く。ジャイロの指北端に力が働いたこととなる。
・力Fにより垂直軸回りにプレセッションが発生し、指北端は北方向に回転する。
・ジャイロは北方向にプレセッションを続ける。北方向にプレセッションし続けるためには、指北端は常に水平より上向きで、力Fを受けなければならない。
・指北端は北を向く。
・北を向くまで指北端は水平より上である必要があるが、北を向いた後もプレセッションが働き続け、指北端は西に向き始める。すると、反対のプレセッションを起こして北を向き、通り越して東へ向き始める。これを繰り返してしまうので、北を向いて静止する装置(制振装置)をつける必要がある。
ジャイロコンパスの誤差の種類
速度誤差、変速度誤差、動揺誤差、旋回誤差、緯度誤差
・速度誤差
航行する船舶は、地球の周りを回転運動しており、これによって地球の自転以外の影響を受け、ジャイロ軸の静止点誤差を生じる。これが速度誤差である。
速度誤差は船舶の速度、緯度、針路によって変化し、速度と緯度については自動で修正されるが、針路については手動で修正する。針路は東西の場合はゼロ、北の場合は西偏、南の場合は東偏となる。
・変速度誤差
船舶が速度を変えると、新しい速度誤差にすぐに対応できず誤差を生じ、これを変速度誤差という。同速度で針路を変えた時にも、南北方向分の速度が変化するので速度誤差を生じる。
船舶が航行している時は、速度誤差に対応してジャイロは静止している、新しい速度誤差が発生した際にすぐにジャイロ軸がその誤差に対応し静止すれば良いが、加速度の為に水平軸・垂直軸周りにトルクを生じる。これによってプレセッションを起こし、制振装置によって新しい静止点に収斂するようになる。静止までの時間は3時間を要するので、その間不定誤差を生じる。
・動揺誤差
船舶が動揺することで加速度や遠心力が発生し、ジャイロにトルクが発生し加速度誤差や遠心力誤差を生じる。これらを合わせて動揺誤差という。誤差は4隅点(北東・南東・北西・南西)で最大になり、4方点(東西南北)でゼロになる。
スペリー系では、容器内の液体の粘性により流動を抑制すると共に、ジャイロ球の重心が浮心(中心)と一致するように調整されており、動揺誤差は生じない。
アンシューツ系ではジャイロ球が外球またはコンテナの支持液の中に浮かんでおり、ジャイロ球の内部にある2個のジャイロを連結し、傾斜の周期を大きくしているので、短い動揺周期のトルクが作用しても影響がなく、ジャイロ軸がほぼ水平状態保持できるようにして動揺誤差を防止している。
・旋回誤差
船舶が旋回したときに垂直軸周りに摩擦などトルクを与える原因があると、プレセッションに誤差を生じ、これを旋回誤差という。
スペリー系で最新のものは摩擦のない構造の為、発生しない。
アンシューツ系ではセンターピンなどの摩擦がなければ生じない。
・緯度誤差
スペリー系のジャイロコンパスの制動装置では、見かけの静止点を得るためにジャイロ軸が俯角、子午線に対して偏角を持っている。この偏角が緯度誤差である。スペリー系特有の誤差とされてきたが、現在の機器では緯度誤差を生じないような工夫がされている。
ジャイロエラーの検出方法を述べよ。
出没方位角法
<方法>
この方法は太陽のみで観測できる。天体(太陽)の中心真高度が0度のとき、方位鏡でそのコンパス方位を測定し、天測暦の出没方位各表から求めた真方位と比較して誤差を求める。
観測に必要なものは、①観測者の緯度・経度②赤緯(天測暦を用いて得る)
<測定時機>
天体の中心真高度が0度のとき。
眼高差、地上気差、視差および視半径を改正すると、太陽はその下辺高度が約20’となる。
つまり、その下辺が視水平から20’だけ上にあるとき=視半径の約1.5倍太陽が浮き上がって見える時が、真高度0度のときである。
計算が簡単なことが利点であるが、天体が太陽のみに限られ、観測時機が真日出没時のみであることが欠点。
月の場合は真中心高度が0度のとき、その上辺高度は約-3’となる。つまり視水平以下となり、見ることができない。恒星では一日の角度の変化が少なく、出没のタイミングが限られる。
時辰方位角法
<方法>
天体のコンパス方位を測定すると同時にクロノメータを読み、測定時の時角、緯度、赤緯を用いて天体の真方位を算出する。計算にはSDh表などが用いられる。
観測に必要なものは、①観測者の緯度②赤緯③時角
<利点>観測時機に制限がなく、利用範囲が広いことが利点。測定誤差を小さくするためには天体の高度があまり高くない出没に近い時機を選ぶと良い。
<測定時機>
方位変化が少なく、高度もあまり高くない時機がよい。
方位変化が少ない時機
・緯度と赤緯が同符号で、赤緯>緯度(赤緯が緯度より大きい)場合は、天体が東西圏に最も接近したとき(最大方位角)
・緯度と赤緯が同符号、赤緯<緯度(赤緯が緯度より小さい)場合は、天体が出没時と東西圏の中間、にあるとき。
・緯度と赤緯が異符号のときは、出没時付近。
天体高度
一般的には天体高度があまり高くない時で、高度27°付近が最も良い。高高度の天体は避ける。
<北極星方位角法>
北極星は天の北極の近くに位置し、極距離(北極星と天の北極との角度の差約53’で極のまわりを23h56m4sで一周している。測定時の緯度と時角を要素として天測暦の北極星方位角法から真方位を求める。
観測に必要なものは、①緯度②時角
北極星は2等星と暗い恒星で、薄明時など水平線の明るい時機に肉眼及び六分儀の視野にとらえることは困難である。六分儀のインデックスバーに推定緯度と北極星緯度表の第一改正値の符号を逆転させ、値を加減して合わせると容易に発見できる。
<トランジット(重視線)による方法>
導灯などは、海図に重視線の方位が記載されている。海図記載の方位と、実際にジャイロコンパスで測った方位を比較して、ジャイロエラーを求める方法
<防波堤を用いたジャイロエラーの測定方法>
防波堤が、船の正横あたりに来て、一直線に見えた瞬間に、その方位をジャイロコンパスで測定する。
その後、海図で岸壁の直線部分の方位を測定して、比較する事によりジャイロエラーを求める方法
<岸壁の方位を用いる方法>
停泊している岸壁の法線の方位を、海図上で測定する。
その後、ジャイロコンパスが示している船位方位を測定し比較する。
コンパス方位が99度、求めた方位が100度の場合、ジャイロエラーの値はいくつか
修正後の値が真方位となる様に修正するので、99°+1°=100°(つまり+1°となる)
ジャイロに入力される情報は何か
ジャイロの針路が入力されている機器 を答えよ
■オートパイロット
オートパイロットの調整にはどのようなものがあるか。また説明せよ。
① 舵角調整
Set Courseに対するHead Courseのズレ(偏角)に対してどのくらい舵を切るかの調整。
Condition(速力、トリム、喫水)などの変化に応じて舵の効き方が異なることを考慮して、調整する。
② あて舵調整
Head CourseがどのくらいSet Courseに戻ったら舵を中央に戻すかの調整。
偏角のみならず回頭角速度に比例した舵角を加味すると、実質的にあて舵として効果がある。
舵角調整と同様に、Condition(速力、トリム、喫水)などの変化に応じて舵の効き方が異なることを考慮して、調整する。
③ 天候調整
ヨーイングに対して、舵角のあそび(舵を自動で取らない範囲)の幅を決める調整のこと。
荒天の場合は舵にかかる抵抗が大きく、それによる速力低下も大きくなるので、このような調整がある。
オートパイロット操舵機の故障時における対処法を説明せよ
① 舵角調整
Set Courseに対するHead Courseのズレ(偏角)に対してどのくらい舵を切るかの調整。
Condition(速力、トリム、喫水)などの変化に応じて舵の効き方が異なることを考慮して、調整する。
② あて舵調整
Head CourseがどのくらいSet Courseに戻ったら舵を中央に戻すかの調整。
偏角のみならず回頭角速度に比例した舵角を加味すると、実質的にあて舵として効果がある。
舵角調整と同様に、Condition(速力、トリム、喫水)などの変化に応じて舵の効き方が異なることを考慮して、調整する。
③ 天候調整
ヨーイングに対して、舵角のあそび(舵を自動で取らない範囲)の幅を決める調整のこと。
荒天の場合は舵にかかる抵抗が大きく、それによる速力低下も大きくなるので、このような調整がある。
■ログ(船速計)
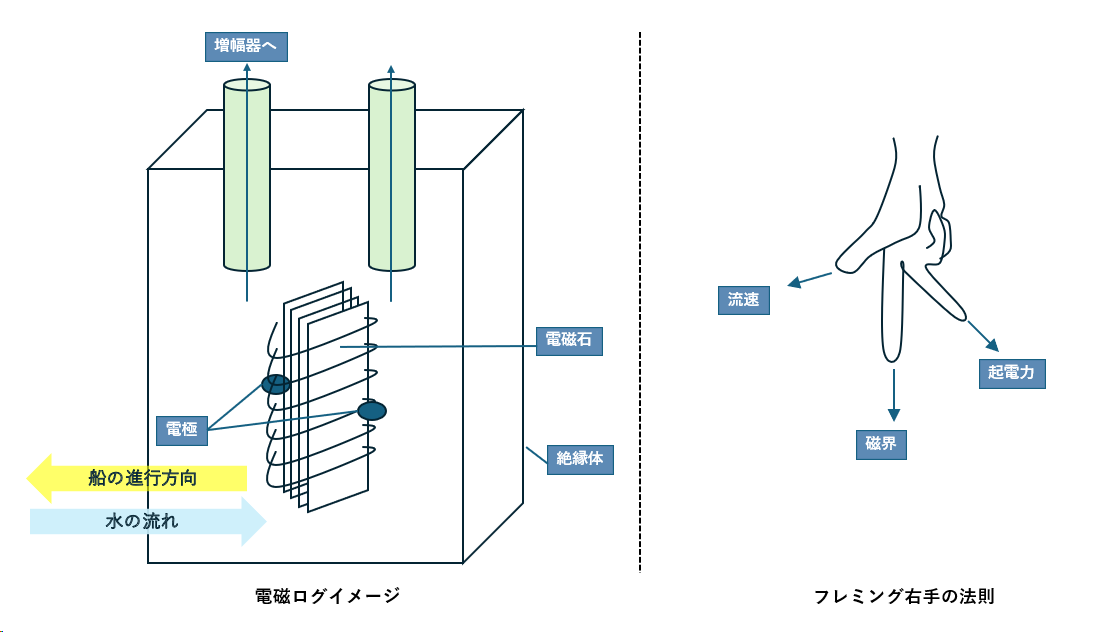
電磁ログの測位原理と特徴を述べよ
フレミング右手の法則(運動方向、磁界の方向、誘導起電力の方向)を利用した船速計。
磁界と誘導起電力が直角に交わるように電極を設けたセンサーを船底に設置すると、海水が導体となり、その海水は船の運動とは反対方向に運動することから、船速に比例した誘導起電力が生じ、誘導起電力を計測することで対水速力を求める。得られる速力は対水速力のみである。
電磁ログの中間誤差調整について説明せよ
速力に比例しない不均等な速力表示誤差を修正するための調整。
ドップラーログの原理と特徴を述べよ
ドップラー現象は、近くを通る救急車などの音源が近づくときと遠ざかるときで音の高さが変わる現象である。
音の変化、つまり周波数の変化量(ドップラー偏位量)が音源と聞く人の距離の変化率に比例することを利用して、音源の速さを求めることができる。
船の底に取り付けられた超音波受信器から海中に向けて超音波を発射し、その反射波に含まれるドップラー偏位量を測定することで、船の速さを測定することができる。
ある物体から発射された速度cの音波が、速度vの船で受信されたとき、受信周波数frは発射周波数ftと異なり、その差fdは
fd=fr-ft=(2×ft×v)/c
となる。このとき、ftとcは既知の数値なので、frを測定すればvを求めることができる。
ドップラーログが自動で対地から対水に変わるのはなぜか
ドップラーログの誤差とは何か
ドップラーログの振動子とは何か
■レーダー
レーダとは,どのような性質を利用して何を測る機械か、レーダーで物標映像が映るための条件とは何か
Radar(Radio Detection and Ranging)
レーダーは電波をパルス波にしてアンテナから発射する。
物標に届いたパルス波が反射し、アンテナで再び受信し映像にする装置である。
電波を発射し、反射波を受信するまでの時間と、アンテナ方向から物標の方位を測定することで、その位置を知ることができる。
レーダの直進性、指向性、反射性とはなにか
レーダーの見通し距離はどのくらいか
D ≒ 2.2(√H1 + √H2)(NM)
D: レーダーによる見通し距離(NM)
H1: 船上のレーダーアンテナの設置高(m)
H2: 他船等の物標高(m)
CCRPとは、位置はどこか
(Consistent Common Reference Point)
CCRPとはECDISやレーダーに表示されている本船位置のことである。例えば、AISに表示される他船の位置は、このCCRPの位置が表示されており、一般的には船橋中心であることが多い。ただし、CCRPを船体中心など任意位置に設定することも可能である。
Radar 画面上の方位表示方式には何があるか。
・North Up(真方位表示)
表示画面の中心からその頂部を結ぶ線が真北を示す方式。
映像と海図の対比が容易となる。
変針やヨーイングしている際、映像が触れ回らないので、映像がぶれることなく、正確に方位測定を行うことができる。
・Head Up(相対方位表示)
表示画面の中心からその頂部を結ぶ線が船主方向を示す方式。視認している物標と映像との方位関係が同一となるため、物標と映像の対比が容易。変針やヨーイングにより映像がぶれることがある。
・Course Up(針路表示)
表示画面の中心からその頂部を結ぶ線が予定の針路方向を示す方式。設定針路が固定されるため、ヨーイングによる映像のぶれはないが、設定針路が変わる度にコースを設定しなおす必要がある。
レーダーがマイクロ波を使用する理由を述べよ
マイクロ波は電波の分類の中で、波長が短い方に分類される。その特徴は次のようなものがある。
波長が短いほど、
・直進性が良い
・鋭いビームを作りやすい
・小さい物標からの反射が強い
・外部からの混信や雑音が少ない
・海面反射による影響を少なくすることができる
・短いパルス波を得ることできる
レーダーにおける対水速力、対地速力に関して
対水安定 :
自船の針路・速力としてジャイロコンパス等による船主方位と対水速力を使用することをいう。
画面に表示される他船のベクトルは海面に対する運動を表すため、潮流の影響等にかかわらず目視による見合い関係と一致する。
対地安定 :
画面に表示される真ベクトルは対地運動を表す為、潮流等の影響がある場合には、目視による見合い関係と一致しないので注意しなければならない。
場面によって、対地表示と対水表示どちらを使用するべきか異なる。場面ごとの使い分けについては、下記ページを参照されたい。
/航海士/Radar のベクトルって実務上どう使っているんだい!|ウクレレ航海士 (note.com)
新造船のレーダ据付時の注意事項について
・起動方法
・XバンドとSバンド機器の確認
・電子カーソル
・VRMの使用方法
・ARPAの使用方法、TMとRMの使い分け。
・船体構造による斜影の有無
・最小探知距離
・映像の方向に誤差がないか。
・船体構造による反射の有無など
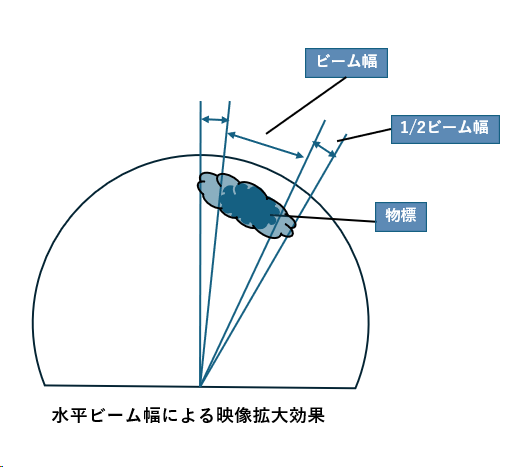
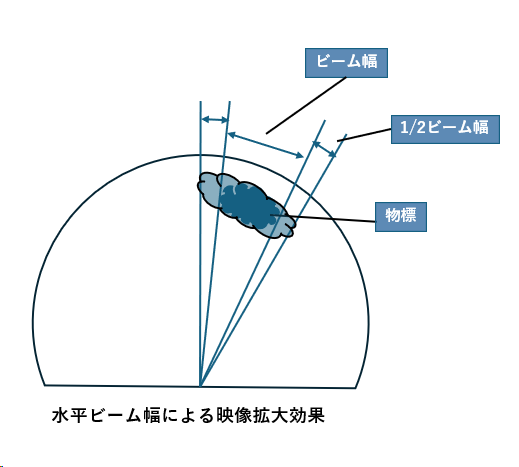
レーダ電波の水平ビーム幅とは何か。映像拡大効果とどう関係があるか、水平ビーム幅はいくらか
レーダー電波は水平方向と上下方向にある程度の幅を持っている。水平方向の幅を水平ビーム幅、垂直方向の幅を垂直ビーム幅という。
水平ビーム幅はアンテナの水平長により大きく異なる。
Xバンドレーダーで、水平300cmの長いアンテナがあるが、この場合水平ビーム幅は0.75度。また、逆にビーム幅が広いレドームタイプのアンテナでは、水平長40cmという超小型のものがあるが、この場合の水平ビーム幅は5.7度と広くなっています。ある程度拡がりを持った物標は、水平ビーム幅の半分ずつ外側へ広がった映像となる。
垂直ビーム幅は一定の幅に設定されている。垂直ビーム幅はピッチングやローリングにより、レーダー探知に大きく影響を受けない角度としてあり、大体20-25度の範囲。
レーダーのみで船位決定する際、距離と距離、距離と方位、方位と方位で最も正確な方法はどれか。
距離と距離。レーダーの距離は正確であるが、方位は映像拡大効果により誤差(大体1~2°)があるため。
距離誤差、方位誤差について述べよ。
<距離誤差>
・距離目盛による誤差は約2%程度である。
<方位誤差>
水平ビーム幅による映像拡大効果により、ある程度拡がりを持った物標は、水平ビーム幅の半分ずつ外側へ広がった映像となる。約2度ほどの誤差を持つ。
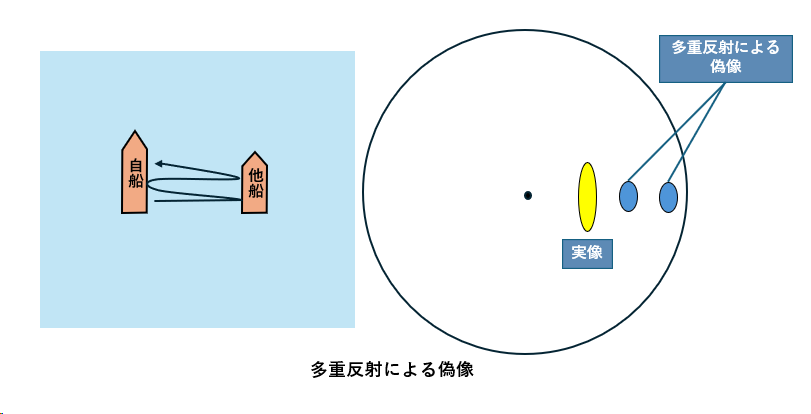
レーダの偽像の種類をあげ,ホワイトボードで説明せよ。
<多重反射による偽像>
自船と物標が1nm以内の距離に接近して並行すると、物標のレーダー電波の反射強度が強く、レーダー電波が自船と物標の間を2-3回往復することがある。この現象を多重反射による偽像という。正常の位置に現れる映像の外側に、同一方向・同一間隔で現れる。
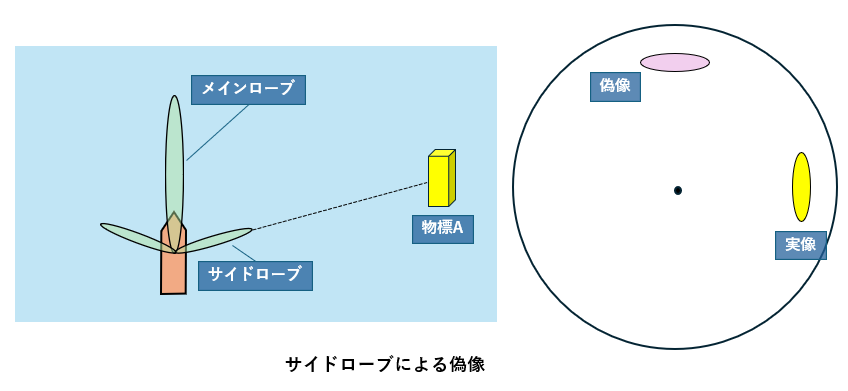
<サイドローブによる偽像>
アンテナから発射される電波のうち、アンテナの向いている方向(メインローブ)以外にも、わずかにサイドロープが発射されている。反射の強い物標が近距離にある場合、自船のレーダーのサイドローブで探知してしまうことがある。この場合は、その物標と距離は同じでも、方位はメインビームの方向に映像が現れるので約90°違った位置に現れ、全く物標のない場所に偽像として現れる。一般的には数キロメートルから十数キロメートルの範囲で発生する。
右側のサイドローブが発生しない特殊なレーダーがあると仮定します。偽像は真像のどちらの方向にでるか
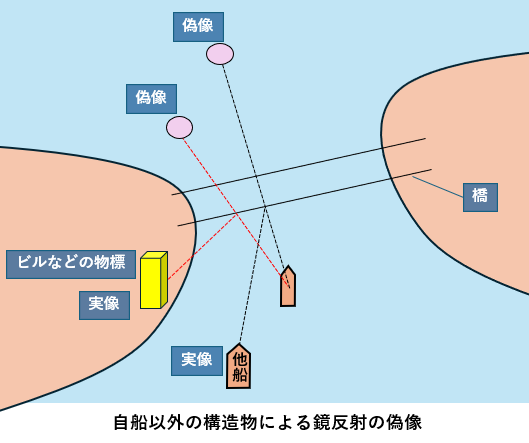
<自船以外の構造物がの鏡反射による偽像>
陸上の構造物や、海上に架けられた橋などが鏡となって、付近にある物標の偽像を鏡となった構造物の後方に現す場合がある。陸上の構造物が鏡となる場合には、偽像はその背後の陸地の映像の中に生じるから問題とはならないが、海上に架けられた橋が鏡となる場合には、方向はその橋の反射点の方向で、背後の海域に、距離は構造物と実像との距離とを加えた距離に偽像が現れて、あたかもそこに物標があるように映り、航行上の障害として現れることがある。
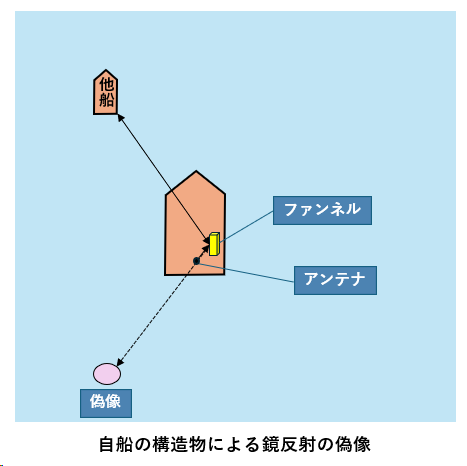
<自船の構造物の鏡反射による偽像>
船の煙突やマストがレーダーの空中線に近いときには、レーダーから出た電波が一度煙突などに当たって他船に行き、その他船で反射した電波が再びその煙突などに当たってから受信される場合がある。このような場合は、レーダーの空中線からみて、煙突等の鏡となった構造物の方向で、距離は自船から他船までの距離と殆んど同じ場所に偽像が現れる。
<第2次(3次)掃引偽像>
第2次掃引偽像とは、スーパーリフラクションやダクト状態で発生しやすい現象の一つ。これらは主に陸地で囲まれた海面で夏季に起こる。通常、レーダースコープでは、最大探知距離よりも遠い物体からの反射波が帰ってきても、掃引が停止しているときには輝点が中心に戻っており、映像にはならない。しかし、さらに遠方の物体から強い反射波が戻ってきた場合、その時点で次の掃引が既に始まっていれば、次の掃引線上に輝点が現れることがある。このとき、輝点は第2次掃引偽像と呼ばれ、方位は大まかに正しいが、距離が実際よりもかなり小さく表示される
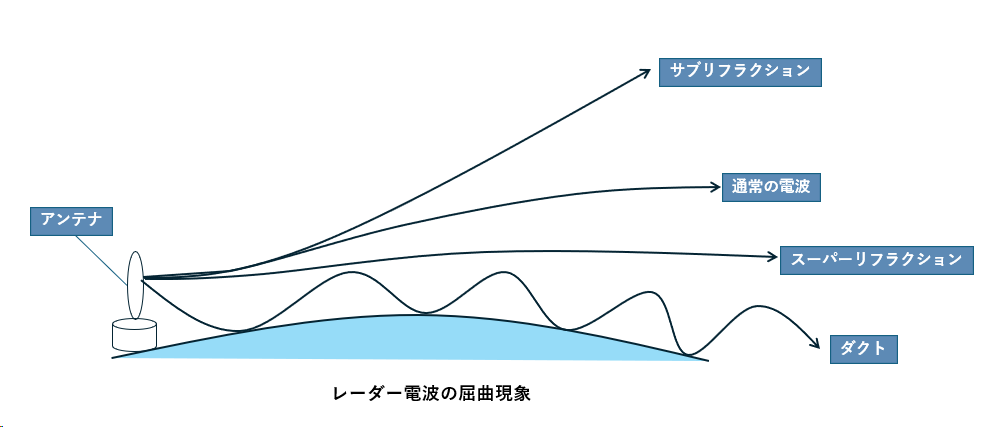
スーパーリフラクション、サブリフラクションについて図示説明せよ
<スーパーリフラクション>
現象 :
電波が標準より下に屈折してレーダー直視距離が増大する現象。下層大気の屈折率が標準より大きいことで起こる。
起こる場合 :
・暖気が寒気の上方にあり、高度と共に温度が上昇する場合(気温の逆転)
・高度があがっても、温度の低下が緩やかな場合。
・高度とともに相対湿度が減少している場合。
<サブリフラクション>
現象 :
電波が標準より直進したり、上方へ屈折するために、レーダー直視距離が減少する現象。下層大気の屈折率が標準よりも小さいことで起こる。
起こる場合 :
・高度と共に温度の低下が激しい場合
・高度と共に湿度が増加している場合。
<ダクト>
スーパーリフラクションが生じる状態がさらに著しくなると生じる。この場合、下方に屈折して海面に達した電波が上方に反射し、また下方に屈折するというふうにしながら、非常に遠くまで到達する現象。
STC,FTCについて説明せよ。
STC : Sensitivity Time Control 海面反射抑制
海面の波に電波が海面反射し映像となると、その中にある物標を判別することが困難になり、これを除去する機能。強くしすぎると漁船やブイなど小さい物標の映像も一緒に除去してしまうので、注意が必要である。
STCはレーダー画面の自船周囲4nm程度に適用される。
FTC : Fast Time Constant : 雨雪反射抑制
雨や雪などから反射があると、しゅう雨性の雨であれば、島と同じような現れ方となり、その中の物標の判別が困難になる。これを除去する機能。
雨や雪は同じ場所に留まらず常に落ちていくため、受信信号を時間微分することで除去できる。STC同様、強くしすぎると他の小物標の映像も一緒に除去してしまうので注意が必要。
FTCはレーダー画面全体に適用される。
ACとSTCの違いについて述べよ
レーダー設置時にまず初めに何を調査するか
・乗船時レーダーについては最低限何を調査及び確認するか
最大探知距離、最小探知距離、方位分解能、距離分解能とは、それは何によって決まるか
2物標がどれだけ離れていたら2物標として探知できるか
ECDISでのレーダーのオーバーレイシステムについて、どのようなときに使用し、どのような利点欠点があるか
レーダでのswappingについて詳しく説明せよ
■ARPA
ARPA のロストターゲットした時に鳴るアラームの種類を述べよ
<Guard ring alarm>
自船の周囲に、その範囲以内に他物標が入った際にアラートする。手動で範囲(NM)を設定する。
<Lost target alarm>
ARPAでトラッキング中の物標を追尾できなかった場合、最後のトラッキング位置を示すと共にアラートする。<>
<Danger Target alarm>
CPA/TCPA以下の物標があるとアラートする。手動でリミット(NM, min.)を設定する。
<Full target alarm>
トラッキングしている物標がARPAの制限数を超えた場合にアラートする。
IMOの規則では、ARPA装置が同時に追跡できる最低ターゲット数が規定されており、少なくとも20個のターゲットを同時に追跡できなければならないが、実際の規定は地域や国によって異なる場合がある。
参考にFURUNO製のレーダーでは、最大100の物標のトラッキングが可能。
ターゲットの表示方法、ベクトルには何があるか
IMOで定めているARPAの性能基準を説明せよ追従性やベクトルを安定させるためにどのような処理が行われているか追従性やベクトルを安定させるためにどのような処理が行われているか
■GPS
GPSの測位原理について述べよ、どのような誤差があるか。精度は何メートルか
約30個の衛星が地球全体をカバーし、6つの軌道面に4機ずつ人工衛星が配置されている。
これにより、地球上のどこでもいつでも高精度の三次元位置の測定が可能となる。
測位は、衛星から発射された電波が利用者受信機に到達するまでの時間を測定し、その時間から衛星までの距離(擬似距離)を算出します。2つの衛星からの距離の差を計算することで、等距離差の点は2つの衛星を焦点とする回転双曲面上になります。
そして、もう一組の衛星対からなる回転双曲面との地球上における交点から、利用者の位置を求めることができます。
電波の速度は光の速度と同じ秒速約30万キロメートルです。
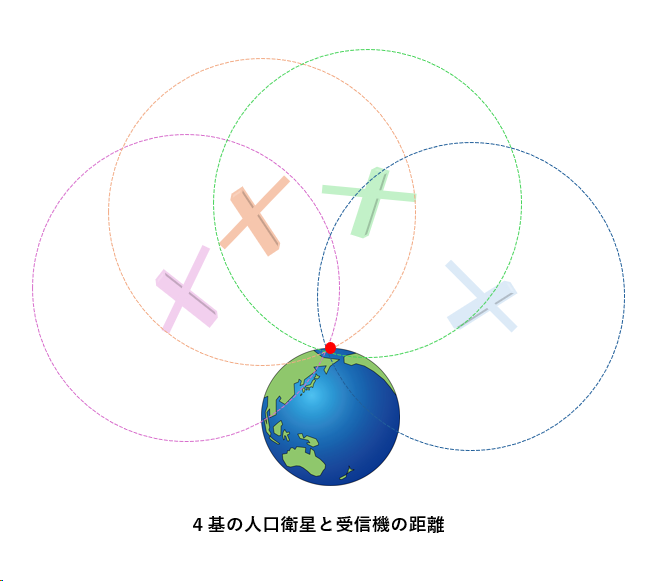
緯度経度を求めるのに衛星が二次元測位では3個以上,三次元測位では4個以上必要な理由は何か。
二次元測位では、3つの衛星が必要である。これは、2つの衛星からの擬似距離だけでは、受信機の位置を一意に特定することができないからである。3つ目の衛星からの擬似距離を利用して、受信機の時計の進み/遅れを補正することが必要になる。
同様に、三次元測位では、さらに1つの衛星からの擬似距離が必要となる。これにより、受信機の高度の情報も得ることができる。そして、4つ目の衛星からの擬似距離を利用して、受信機の時計の進み/遅れを補正する。
GPSの擬似距離とは何か、電波の伝搬速度はどのくらいか。
擬似距離は、GPS受信機が衛星からの信号を受信する際に計測される距離であるが、この距離は直接の物理的な距離ではなく、いくつかの誤差や影響を考慮した補正が含まれている。
これらの誤差や影響には、以下のようなものがある:
信号伝播遅延(Propagation Delay): 衛星からの信号が大気中を通過する際に生じる遅延。大気の密度や組成の変化によって影響され、これを補正する必要がある。
衛星時計の誤差(Satellite Clock Error): 衛星の時計が完璧でないための誤差。
受信機時計の誤差(Receiver Clock Error): 受信機の時計が正確でないための誤差。
多径伝播(Multipath Propagation): 受信機において、信号が直接受信されるだけでなく、建物や地形などに反射されてしまうことがある。
これらの誤差や影響を補正することにより、より正確な位置情報を得ることができる。
電波の速度は光の速度と同じ秒速約30万キロメートルです。
人口衛星の時計はどのような仕組みで動いているか
DGPSが無くなるがその代わりはなにか。
・DGPSは2019年3月に運用を終了した。
・IMOは船舶に外洋で100m以内、港内で10m以内の測位精度を求めているが、GPSそのものの測位精度が上がり(約10m)、DGPSを用いなくとも必要な精度が実現している。
・DGPS以外にGPSの補正情報が得られるシステムとして、運輸多目的衛星用衛星航法補強システム(MSAS)は、多くのGPS受信機で利用できる。(みちびきやひまわりがそれにあたる)
・準天頂衛星みちびきの運用が始まり、さらに測位精度が向上する。(約1mと言われている)
・DGPSロールオーバー(DGPS装置内の時刻管理が不能となる障害)により、DGPS装置の時刻管理が不能となり、補正情報の信頼性を担保できない状況となる。
GPSの誤差を示す指標を述べよ。
・GDOP(Geometric Dilution of Precision) : 3次元測位の場合の位置精度指標
・PDOP(Position DOP) : 2次元測位の場合の位置精度指標
・VDOP(Vertical DOP) : 高さに関するもの
・TDOP(Time DOP) : 時間に関するもの
・HDOP(Horizontal DOP) : PDOPの水平方向部分
スペクトラム拡散とは
GPS電波の送信方式。幅広い周波数帯域を狭い帯域に分散させる手法。
<効果>
・耐妨害性(Resistance to Interference):
通信において妨害を受けにくい。
・多重アクセス(Multiple Access):
同一周波数帯を利用でき、多重アクセスが可能。
・セキュリティ(Security):
信頼の秘匿性がある。特定の周波数で送信される信号を探知しやすくするためには、拡散符号を知らないと正確なデータを復元することが難しくなる。
・低インターシンボルインターフェランス(Low Inter-Symbol Interference):
拡散符号により、送信されたシンボルが時間的に広がるため、隣接するシンボルとの干渉が低減される。これにより、シンボル同士の干渉が抑えられ、通信の信頼性が向上する。
・抑制可能な干渉(Mitigatable Interference):
拡散符号が利用されている場合、一部の周波数での干渉が部分的にでも発生しても、正確なデータを復元できる可能性がある。これにより、通信の品質を保つことができる。
GNSSの種類を挙げよ
GPS が二台とも故障した場合どの様な対応をとるのか
PRN(疑似ランダムノイズ)とは何か
P・C/Aコードを説明せよ
■AIS
AIS の説明及びARPA との違い
AIS(Automatic Identification System):
他船の情報(Call sign, 船名, GPS位置、針路、速力、目的地等)を表示することができ、当該船の意図を推察したりVHFで交信する時に有用である。また、肉眼やレーダーでは探知できない島影などにいる船舶を事前に探知することができる。しかし、他船がAIS信号をOFFにしたり誤った情報を発信する可能性があるため、AIS情報のみによって衝突のおそれを判断してはならない。
ARPA(Automatic Radar Plotting Aids):
レーダーにより物標を探知し、その情報を自動的にプロッティングし、相対運動や真運動を解析する。避航操船に必要な様々な情報を得ることができる。レーダーにより得た他船の相対ベクトル(針路、速力)と、自船の針路、速力によって構成させる速力から、他船の真ベクトルを求める。
■天文航法
高緯度地域と比べて低緯度で薄明時間が短い理由
航海薄明とは
天測(計算の流れと、星の見つけ方)
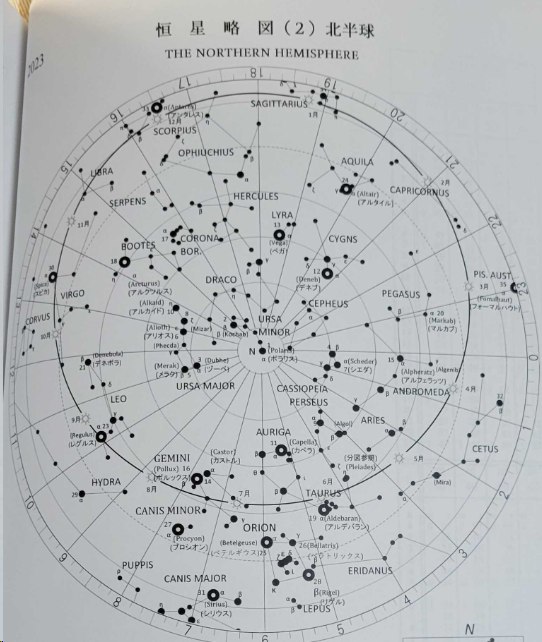
恒星略図の使い方について説明せよ
その地点で見ることができる常用恒星を把握するために用いる図を、恒星略図という。
使用方法は以下の通り。
①その地点の緯度経度を、世界時(UTC)に直す。
②その世界時を元に、Nautical Almanac(天測歴は廃刊されている「天測歴」等の廃刊について (mlit.go.jp))を使用し、0時の恒星時を求める。
③求めた恒星時に経度を足す、Eastなら+、Westなら-し、地方恒星時を求める。
④恒星略図を使用し、コンパスで90度を取っておく(コンパスをひろげて、90度にしておく赤道から極までの範囲と同じ)
⑤恒星略図の外周には、時間が記載されており、求めた地方恒星時に対応する。地方恒星時と、その地点の緯度の交点にコンパスの針を置き、90度の円を描くと、その円内はその地点で見ることができる常用恒星の概略になる。
天測時における誤差には何があるか。
六分儀の誤差で、低高度気差とは何か
天体を同時観測時の注意点を挙げよ
アジマスミラー、アジマスサークルの使い方を説明せよ
天測に関し位置の圏の曲率の誤差について述べよ
索星表の使い方を説明せよ
天文航法の子午線集合差について説明せよ
■地文航法
地文航法の航程線航法について説明せよ。具体的にどういった航法があるか。利点や特徴について説明せよ
航程線(Rhumb Line) : 針路一定で進んだ場合の船の航跡(針路一定の線)
・計算が容易、航路の作成も簡単にできる。
・船舶が輻輳する海域や狭い水道においても有用
中分緯度航法を説明せよ。
<平均中分緯度航法>
2地点の中分緯度を用いて、その2地点間の東西距と変経の変換を行い、 両地間の航程,針路,変緯,変経等を求める航海算法が中分緯度航法である。
A点からB点まで航行する時、航走距離(航程)の東西方向成分(東西距) と両地点を通る子午線の間隔が等しくなる緯度を両地点の真中分緯度 (True Middle Latitude)と呼ぶ。これに対してA点とB点の平均緯度を 平均中分緯度(Mean Middle Latitude)と呼び、平均中分緯度における 両地点を通る子午線の間隔は、A点からB点までの東西距にほぼ等しくなっている。
そして、東西距と変経の変換を行う場合に平均中分緯度を用いるのが 平均中分緯度航法(Mean Middle Latitude Sailing)である。
理論的には近似計算であって、その誤差は通常の航海では実用上さしつかえない程度であるが、特に正確さを要求される場合や長い航程について計算する場合、または次のような場合は、漸長緯度航法か真中分緯度航法がよい。
出発地と到着地の緯度を中分(平均)した緯度を中分緯度として、変経(経度の差)を算出する。
<長所>
漸長緯度表のような特別の数表を用いず、三角関数表だけで計算ができ、算式も比較的簡単で、実用上の精度が得られる。また、トラバース表だけでも計算が可能である。
<短所>
・近似距離であるので、航程が大きくなりやすい。誤差の絶対量が大きくなる。
・経度を求める場合に、東西距に乗ずるsecℓはℓが大きくなると急激に変化するので、真中分緯度(起程緯度から到着緯度までの緯度のsecの平均値に対応する緯度)と、平均中分緯度(起程緯度と到着緯度の平均緯度)との差が大きくなり、経度誤差も大きくなる。
・変緯が大きい場合も、真中分緯度と平均中分緯度の差が大きくなる。
・針路が南北に近い場合には、①変緯が大きくなる。②針路誤差に対する東西距の誤差が大きくなるため、経度誤差に影響する。
・赤道を超える場合には、単純に起程地と到着地の平均緯度で東西距を経差に換算できない。
真中分緯度航法ではなく平均中分緯度航法を使う理由を述べよ
漸長緯度航法とは何か。また利点と欠点を述べよ。
「メルカトル図法(漸長緯度図法)」では経度線は緯度に関係なく平行に表示されている。因って高緯度になる程に東西方向に拡大されるので、それと同じ割合で南北方向の緯度間隔を漸次増長している(漸長緯度の意味)。また経度線が平行である為、図上で2地点間を直線で結べば常に方位(針路)が一定な「漸長緯度航路」になり、相対方位の把握に便利なので海図や地図に多用されている。
<利点>
厳密な計算に基づく計算方法で、地球を扁球として計算することもできる。また、赤道を超える場合でも適用できる。
<短所>
・計算が複雑で漸長緯度を求める場合、算出の為には公式を電卓で解くか、漸長緯度表が必要である。
・針路が約90度に近い時に誤差を生じやすい。D.long=M.D.Lat×tanCoの算式において、針路が90°に近い場合、tanCoが大きくその変化も急激になるので、M.D.Lat.や針路のわずかな誤差がD.Longに大きな誤差をもたらす。。
・高緯度においては、漸長緯度の変化が急激であるので、わずかな緯度誤差も結果としてD.Long(変経)に大きな誤差が出る。
大圏航法とは何か、利点と欠点、有効である(でない)場合を述べよ
大圏航法(Great Circle Navigation)は、地球上の2つの地点間を最短距離で結ぶ航路を計算するための方法。大圏航法は、地球の曲面を考慮し、地球上の最も効率的な航路を求めることができる。
地球は球体であるため、直線距離(直線的な距離)は短いですが、地球の曲面を考慮しない航路では、実際の距離よりも長くなることがある。大圏航法は、地球上の最も短い航路である大圏(Great Circle)を使用して、より効率的な航路を計算する。
大圏とは、地球の表面上で2つの地点を結ぶ円弧のことである。大圏は、地球の中心を通る円弧として定義され、地球上の他のどの航路よりも短い距離を提供する。
<利点>
球面上の2地点間の最短経路は大圏であり、地球を扁球とした場合の最短経路の測地線とも大差はないので、大圏上を航行することにより最短距離で目的地に到着できる。
<欠点>
両地間を結ぶ大圏上を航走すれば、最短距離を航走することになり、きわめて有効である。しかし、大圏を航行するには、絶えず針路を変える必要があり、これは事実上不可能である。従って、実際はこの大圏上に、任意の点をいくつかとり、その地点間は航程圏で航走sる。すると大圏距離より多少の増加はあるが、両地間を航程線で航走する距離より、短縮できる。
これらの変針点を多数採れば、航走距離は大圏距離に接近する反面、しばしば変針することになり、逆に変針点を少なくすれば、変針の回数が減る反面、距離は増加する。これらのことから実際には、両地間の経差を5度または10度ごとに区切った子午線と、大圏との交点をもって、変針点とするか、または1日の概略の航走距離で大圏を区切る方法をとるのが一般的である。
<有効な場合と有効でない場合>
(有効)
・航程が大きい時
・高緯度を長距離航海するほど、航程の差が大きくなる。(短くなる)
・起程地と到着地が東西に隔っているとき(経度差が大きい時)
(有効でない)
低緯度海域・短距離航海(500nm以下)・針路が南北に近い場合は、それほど有利ではない。
有効であるかないかは、メルカトル図法の航程線と比べてどれだけ差があるかに依存する。
全ての経度線(子午線)は南北両極を結ぶ「大圏」である。したがって、南北に走る場合は自然と大圏航法となり、航程線と同じ距離になる。
赤道も大圏の1つと考えれば、低緯度になるほど短縮距離が少ないことがわかる。
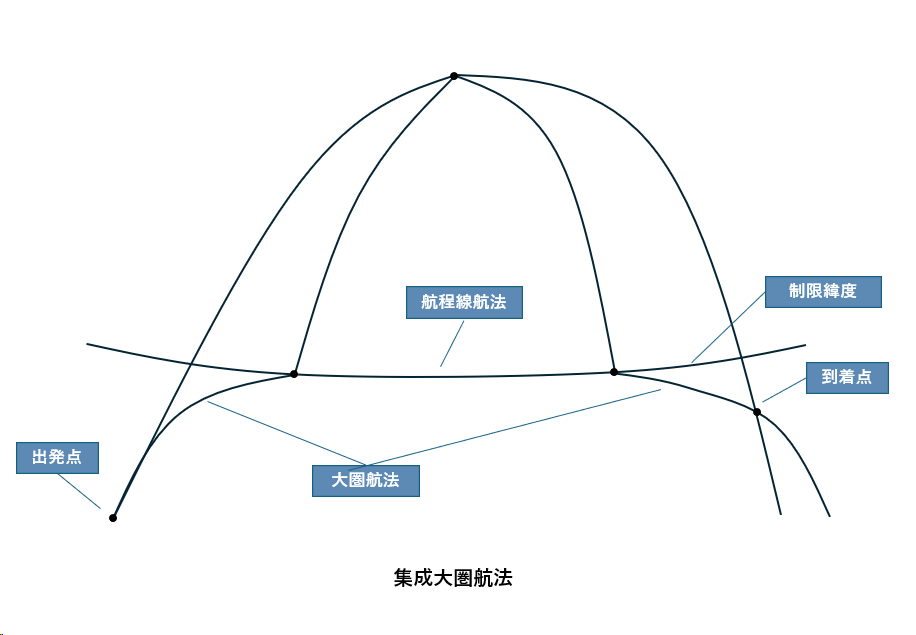
集成大圏航法について説明せよ。
大圏航路のみでは、その航路の頂点付近が高緯度になり、地理的制約や高緯度の荒天域を避けるために航路に制限緯度を設定し、かつ、できるだけ短い経路で航行するための航法。
クロスベアリングは船首尾側と正横側のどちらから測定するか
1マイル離れた物標の方位を測定し、クロスベアリングをした際レピーターに1°の誤差があった。この時自船の位置はどれだけずれるか、sinを使って説明せよ
3本の位置の線で定誤差がある場合、どのようにして船位を求めるか
クロスベアリングの定誤差について述べよ。誤差はどのように示されるか、誤差を小さくするにはどうするか述べよ。
定誤差
1)コンパスの誤差が、正確に改正されていない場合。
2)コンパスの振動、またはカードは小さいなどのために、方位観測に誤差を生じた場合。
3)物標の方位観測に、時間がかかった場合。
4)位置の線を海図上に記入する際に誤差がある場合。
5)方位の読み違い、また物標の見誤りをした場合。
6)海図自体に誤差がある場合(図載位置のずれなど)
人為的誤差
3物標で測位した場合、誤差は三角形として表示される。この三角形が大きいほど誤差が大きい。
誤差を小さくするためには、
・位置が正確で顕著な物標を使用する
・近い物標を利用する
・位置の線の交角を3物標であればそれぞれの交角が60度に近くなるように選定する。2物標の場合は、90度に近いものが望ましい。
・出来る限り速やかに方位を測定する。
・方位変化の遅い物標を先に、方位変化の早い物標を後に測定する。
クロスベアリングをしたときに船位が誤差三角形の外側にくる場合について述べよ
解答
2物標を測定するクロスベアリングにおいて、偶然誤差を含んだ場合の誤差界について図示せよ、誤差界を求める数式を示せ
解答
2物標を使ったランニングフィックスの方法について、図を用いて説明せよ
解答
視界良好時のクロスベアリング、測位の要領・注意事項
・位置が正確で顕著な物標を使用する
・近い物標を利用する
・位置の線の交角を3物標であればそれぞれの交角が60度に近くなるように選定する。2物標の場合は、90度に近いものが望ましい。
・出来る限り速やかに方位を測定する。
・方位変化の遅い物標を先に、方位変化の早い物標を後に測定する。
視界制限時のレーダーでの船位決定、要領・注意事項、方位と距離どちらが精度がいいか。
・物標までの距離はその物標の内側端までの距離を測定する。
・物標はなるべく前面の傾斜角が大きな岬か、小さな島がいい。
・物標はなるべく近距離のものを測定する。
・距離の方が精度がよい。方位は水平ビーム幅の影響で誤差が距離より大きい。
■水路図誌/海図
灯質 Al WR 10s とはどのような灯火か
上記は、灯質を問う問題で最も出題される。下記ページを参照し、概要を把握頂きたい。
(財)航路標識の灯質、日本財団図書館
日本財団図書館(電子図書館) プレジャーボート・小型船用港湾案内 ?本州北西岸? (zaidan.info)
https://nippon.zaidan.info/seikabutsu/1998/00370/contents/007.htm
各浮標識のトップマークと灯質,塗色を述べよ
方位標識の概要については、どの種類も満遍なく出題される傾向にある。下記を参照し、全て解答できるように準備頂きたい。
方位標識
第4管区海上保安本部, 浮標式:方位標識
浮標式:方位標識|第四管区海上保安本部 (mlit.go.jp)
孤立障害方式
第4管区海上保安本部, 浮標式 : 孤立障害標識
浮標式:孤立障害標識|第四管区海上保安本部 (mlit.go.jp)
安全水域標識
第4管区海上保安本部, 浮標式 : 安全水域標識
浮標式:安全水域標識|第四管区海上保安本部 (mlit.go.jp)
特殊標識
第4管区海上保安本部, 浮標式 : 特殊標識
浮標式:特殊標識|第四管区海上保安本部 (mlit.go.jp)
橋梁の灯標・灯質を述べよ
航路標識のA・ B方式とは何か
IALA海上浮標式の適用される標識とされない標識はなにか
電波標識の海図図式とそれぞれの特徴
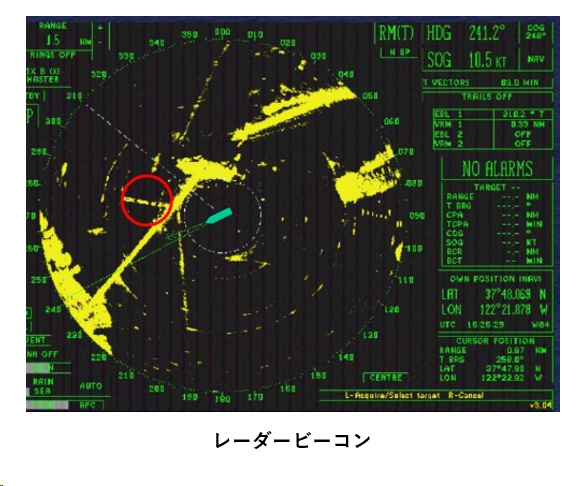
・マイクロ波無線標識(レーマークビーコンやレーダービーコン)
電波の灯台から出している電波を船のレーダーで受けると、船のレーダーの画面上に、船と送信局とを結ぶ延長線上に点線が現れる。レーダービーコンの符号は、PPI上にレーダービーコン局のすぐ後方(中心から見て外側)に輝線で表示される。
・AIS航路標識
リアルAIS航路標識
実在する航路標識から当該標識の位置を示すAIS信号を送信する装置。これは、航行安全のために設置された実在する灯台やブイなどの航路標識から発信される信号で、周囲の船舶に自身の位置情報を提供する。
・シンセ(合成)AIS航路標識
遠隔地から実在する航路標識の位置を示すAIS信号を送信する装置。これは、実際の航路標識の位置情報を基に、遠隔地から合成的にAIS信号を送信することで、船舶に対して航路標識の存在や位置を通知する。
・バーチャルAIS航路標識
遠隔地から実在しない航路標識の位置を示すAIS信号を送信する装置。これは、航路上に実在しないが船舶にとって重要なポイントや危険を示すために、遠隔地から送信される架空の航路標識であり、船舶の航行を支援する。
海図と灯台表の光達距離にはどんなものがあるか、海図と灯台表にはどの距離が記載されているか
① 光学的光達距離
最も条件が良いとき(例えば月明かりや霞が無く波が穏やかな快晴の夜)などに灯台の光が到達可能とされる距離である。
指定を約18nm(大気の透過率=0.85)
*実効光度を2×10-7ルクスとする。
② 名目的光達距離
*光源光度、視程、実効光度から算出される。
視程を10海里(透過率0.74)
実効光度は2×10-7ルクスとしている。
晴天の暗夜に灯台の光がおよそ実用的に目視できる距離である。
上記の②を国際基準に合わせる為に、平成14年4月1日以降は、光源をリズム光(点滅する)として計算したものを使用しており、これを「②’実効光度を用いた名目的光達距離」と呼んでいる。
③ 地理的光達距離
灯高(H)及び眼高さ(h)から算出する地理的光達距離Dは、
D=2.083×(√H+√h)mで求めることが出来る。
灯台表や海図には、眼高を平均水面上5メートルとして計算した数値を使用している。
*光源光度は光源そのものの明るさを表し、特定の方向における光の強さを示す。
実効光度は光源が放射する全ての方向における光の合計量を表し、実際に人が感じる光の明るさを示す。
海図と灯台表にはどの距離が使用されているか?
海上保安庁が発行する海図と灯台表には、②’実効光度を用いた名目的光達距離と③ 地理的光達距離のどちらか小さい方が記載されている。
一方で、IALA(国際航路標識協会)は②’実効光度を用いた名目的光達距離を使用することを明示しており、他の種類の距離の使用は推奨していない。
解答としては、日本(海上保安庁)発行のものでは②`と③の小さい方であるが、国際的には②’が記載されている、こととなる
測地系の種類を挙げよ
■航海計画
大洋航海の航海計画⽴案について、考慮する事項を述べよ。
<航路選定>
・水路図誌その他資料による事前の調査
・航海実施上の安全を第一に考え、最短距離の航行による燃料の節約、所用日時の短縮などの経済的要件の考慮
・季節と海域によりことなる外力の利用と影響
・船位確認のために、航路の途中の有効目標はあんぜんを見積もった航過距離で、多少航程の損失があっても必ず確認できるようにする
・狭水道の通航、港湾の出入港、主要地点の航過時機
・海図の制度、(特に水深と地形)と関連し、浅水箇所、水深不均等の空白地、礁脈、孤立岩礁、沈船などは避ける。
・常用航路、推薦航路の利用
<沿岸航行時>
・陸岸離隔距離、主要目標航過距離の決定
・陸岸並行航路における向岸流、向岸強風に対する警戒
・変針点の決定 : 顕著な島や灯台。航路標識を用いる。
・変針目標の設定 : 新針路方向に、これと並行または並行に近く近距離で明瞭な目標を選定する。船主尾目標やトランジット(重視線)の利用が望ましい
・変針角度に対する考慮 : 大角度変針は避ける
・避検線(NGA)の選定 : 航路上の危険物に対しては、簡単でかつ明瞭な避検線を設定する。
河川航海の航海計画⽴案について、考慮する事項を述べよ。海水比重の変化による喫⽔変化量について述べよ。
<水深>
・海水と淡水の比重差により、喫水が増加する。
・雨や増水により河川の水深・低質は変化しやすいので、海図記載の水深をそのまま信頼することは避ける。
・浅水影響による船体沈下に注意する。
・蛇行した河川では、一般に大回りした方が水深が深い場合が多い。
<航路標識>
・背後の街並みによって、灯火が視認しにくい場合がある。
・最新の海図に改補がされている、変更点が多い
・特定の信号が多いので、注意が必要。流速が早い為に浮標の位置が移動している場合がある。
<河川にかかっている橋>
・最高高潮面上の高さが海図に記載されているので、通過時の潮高と本船の水面上の高さを考慮して、通過の可否を判断する。
・橋脚部分の水流は複雑に変化しているので、十分離れる。
・レーダーにおいれ、橋による偽像の発生により、橋の背後の物標の識別が困難になる場合がある。
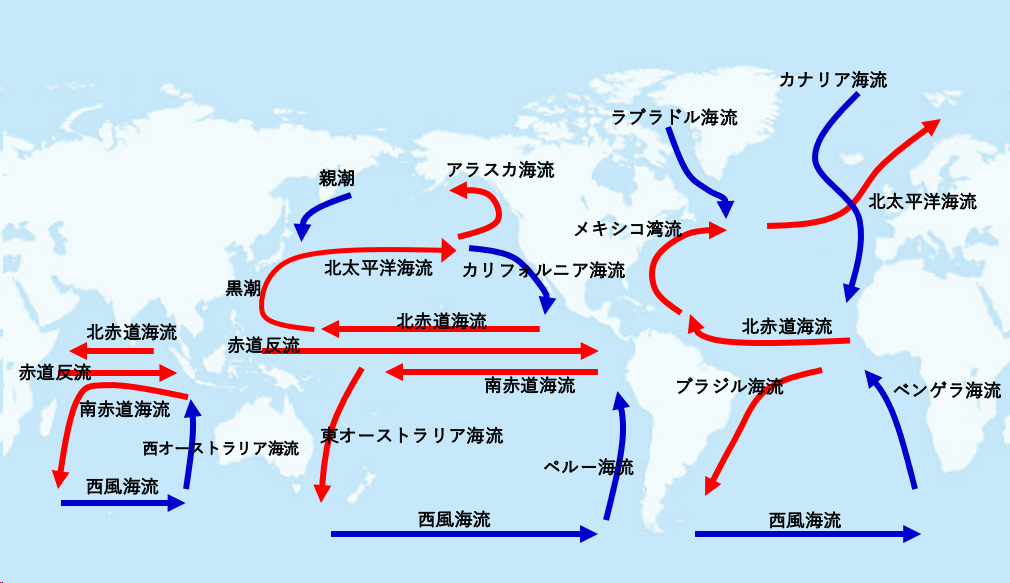
世界の海流について
航海計画を述べる問題では、しばしば海流について問われることが多い。下記の図を参照、できれば白紙から描けるようにし、解答できるよう準備頂きたい。赤線は暖流、青線は寒流を示す。
暖流:赤道(低緯度)から北極or南極側(高緯度)に向かって流れる
寒流:北極or南極側(高緯度)から赤道(低緯度)に向かって流れる
北米西岸(サンフランシスコ等) ~横浜の航海計画
<一般>
・大圏航路が最短距離、かつ黒潮、北太平洋海流およびアリューシャン海流の順流が期待できるが、特に冬季では高緯度域で低気圧が発達しやすく、集成大圏航法を採用するのがベターである。
・集成大圏航法の制限緯度は、天気予報によって異なるが、30N~35Nに設定することが多い。
<風>
冬季の場合、40Nより北では低気圧が頻繁に発生し、中国/日本付近から、アリューシャン列島およびアラスカ南部に向かって通過しているため、荒天に対する注意が必要。低気圧が広がる海域では、風力7、波高6m以上になることも多い。
<海流>
・北米西岸に達した北太平洋海流の一部は北上し、アラスカ海流となる。さらにその一部はベーリング海へと入る。
・40N以南を北米西岸に沿って南下する弱い寒流を、カリフォルニア海流という。季節風によって2月中旬~7月にかけて沿岸に湧昇流(季節風、貿易風などの風、地形変化、潮流等が要因で、海洋深層水が表層近くへ湧き上る現象)が発生し水温が低い。カリフォルニア海流は、南下すると北赤道海流に連なる。
南シナ海の航海計画
(出題例 シンガポール~Luzon straitまでの航海計画、夏と冬で航路を変えるか、どのような風が吹くか、海流は、南シナ海の方へ台風はくるか)
<台風>
南シナ海は熱帯低気圧や台風の発生エリアの一つで、特に多いのは5月から11月までの間で、ピークは7月から10月である。南シナ海で台風が生成される主な理由は、この地域が赤道に近く、海水温が高いために熱帯低気圧が発生しやすい環境にあるからである。また、一年の大半が雨季であることも、熱帯低気圧が台風に発展する条件を整えている。
<季節風>
冬季(おおむね11月から4月):アジア大陸は寒冷であり、その対比として赤道付近は暖かい。この温度差により、陸地から海へ向かう北東風(モンスーン)が吹く。これが「冬季モンスーン」または「乾季モンスーン」と呼ばれるもので、乾燥した気候をもたらします。海上で平均風威力4~5。
夏季(おおむね5月から10月):この時期、アジア大陸は暖かくなり、海洋よりも温度が高くなり、海から陸へ向かう南西風(モンスーン)が吹きます。これが「夏季モンスーン」または「雨季モンスーン」と呼ばれ、湿気を含んだ気候をもたらし、この時期は多雨となります。海上で平均風力3~4。
南シナ海の季節風は、一年を通じてその方向が変わる特徴があります。そのため、この地域の気候や天候は季節風に大きく影響を受けます。
<海流>
季節風に支配されている。夏季の南西季節風期には一般に大陸の沿岸に沿って北東に流れ、冬季の北東季節風期には大陸の沿岸に沿って南西に流れる。流速は夏季・冬季ともに0.5~1.5ノットであるが、季節風の強さに左右される。
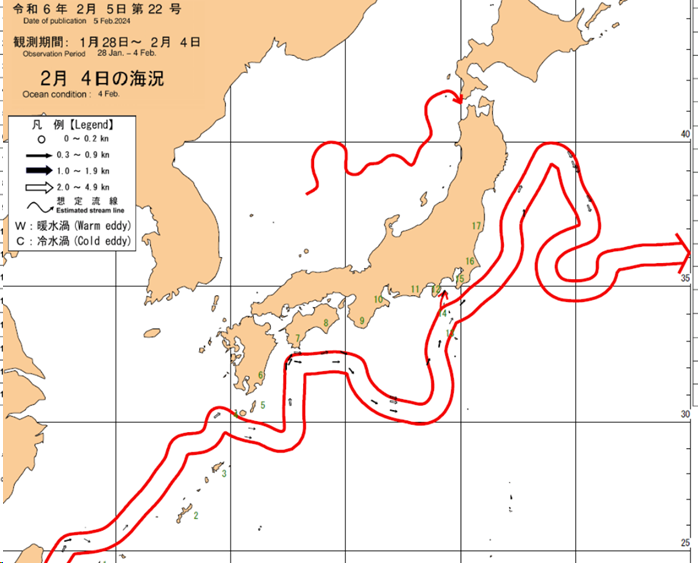
<南シナ海における黒潮>
ルソン島沖を北方へ向かい、台湾と与那国島との間から東シナ海に流入し、大陸棚外縁に沿って北上し、日本の南方海域へ抜ける。2.0-5.0kn
海上保安庁 海洋情報部 : 海洋速報&海流推測図
https://www1.kaiho.mlit.go.jp/KANKYO/KAIYO/qboc/2024cal/cu0/qboc2024058cu0.html
インド洋の季節風と海流を説明せよ
モンスーン海流:
インド洋北部に生じる海流で、モンスーン(季節風)によって形成される。
冬季と夏季で海流の流れる方向が逆転します。これを季節流とも呼ぶ。
夏には南西から北東に向かうソマリア海流が、冬には北東から南西に向かうモンスーン海流に変わる。
インド洋の風系:
インド洋上の風はモンスーンによって影響を受ける。
夏期には南西の季節風が、冬期には北東の季節風が卓越する。
この風の変化に伴い、海流も季節によって異なる流れを示す。
インド洋で台風が発生する時期及びその進路を述べよ
2 月中頃のサンフランシスコ→横浜間 ベーリング海経由の航海計画を立てよ
a) ベーリング海経由の航海計画となる場合、どのような理由があるか
大圏航路に近いため航程が短くなる。
ベーリング海は通常、低気圧が南側を通る事が多く、西航の場合は追い風が期待できる。
西航の場合に逆潮となる、北太平洋海流やアリューシャン海流を避けることができる。
春・夏・初秋には霧が多いが、北側は比較的状況がよい。
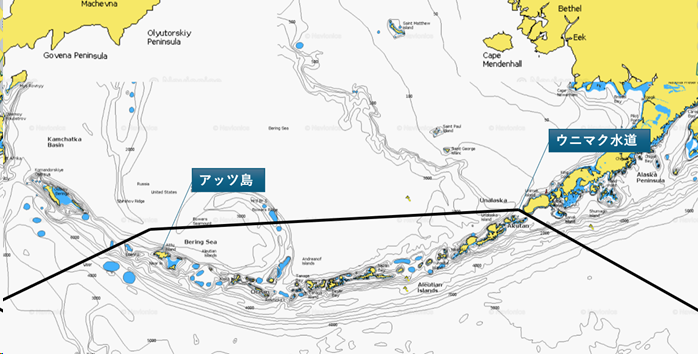
b) ベーリング海の入り口と出口はどことするか(アリューシャン諸島のどこの島を抜けるか)
c) 当該航海計画の注意点
ベーリング海に入るまでは、アラスカ海流の順流、ベーリング海を抜けた後は、親潮による順流が期待できる。また、低温海域の着氷に注意が必要。
太平洋の潮流に関して(内地からシドニー向けの航路において順番に影響を受ける潮流について)
航海計画を述べる問題では、しばしば海流について問われることが多い。下記の図を参照、できれば白紙から描けるようにし、解答できるよう準備頂きたい。赤線は暖流、青線は寒流を示す。
暖流:赤道(低緯度)から北極or南極側(高緯度)に向かって流れる
寒流:北極or南極側(高緯度)から赤道(低緯度)に向かって流れる
大西洋の潮流に関して
航海計画を述べる問題では、しばしば海流について問われることが多い。下記の図を参照、できれば白紙から描けるようにし、解答できるよう準備頂きたい。赤線は暖流、青線は寒流を示す。
暖流:赤道(低緯度)から北極or南極側(高緯度)に向かって流れる
寒流:北極or南極側(高緯度)から赤道(低緯度)に向かって流れる
南太平洋の潮流を図示せよ
ホワイトボードに世界地図を描き日本からのブラジルへの航路を4個記載し説明せよ
航海計画をたてる際に使用する書誌を述べよ。
・(Admiralty Total Tide)
・(Admiralty Digital Radio Signals) – 通報関連
・(Admiralty Digital List of Lights) – 灯台表
・(ROUTING CHARTS) – 航路誌、主要港間の航路と距離、海流、氷限、満載喫水線、風配図のほか、各月の気象・海象予想などが掲載され ています。
・(SAILING DIRECTIONS (PILOT BOOKS )) – 水路誌、入港や沿岸航行に役立つ基本的な情報が掲載されています。すべての船種が使用でき、世界の大半の水域がカバーされています
・(THE MARINER’S HANDBOOK (NP100))– ブリッジでの手順、海図の使用、航海の制限事項など、航海計画の作成に役立つ重要な情報が掲載されています。
・(LOAD LINE CHART) – 当該航海の通航帯域と、本船が積載可能な最大喫水を確認するための図です。
・(SHIPS’ ROUTING ) – IMOにおいて採択された分離通航方式、対面航路、深水深航路、推薦航路、警戒水域、避航水域に関する情報が掲載されています。
・(TIDAL STREAM ATLAS) – 潮流の流向、流速が掲載されています。
・(GUIDE TO PORT ENTRY) – 世界約1万5,000港の詳細な港湾情報をまとめたガイドです。入港前情報、港湾局から要求される書類の内訳、入港可能な最大船型、荷役能力など、安全な寄港を計画するために欠かせない情報が掲載されています。
・(MARITIME SECURITY CHARTS) – 重要な安全・保安情報が掲載されている海図です。海賊やテロなど、保安上の危険に遭遇するおそれのあるハイリスク海域を航行する航海計画を立て、それを実行する際は、この海図を参照し、可能な限りその内容に従うようにしてください。
・e-NP
・Notice to Mariners
パイロットチャートには何が書かれているか
はじめて入港する港は、どのようなことを確認・注意し、事前調査するか。
(1)港湾事情
水路誌および港湾図等により、次の事項を調査する。
・港湾の地形、水深、測量精度、底質
・風向/風速/視程など
・潮汐/潮流
・バースの位置、係船能力
・荷役設備
・航路管制、信号、特別なルール
・船舶の輻輳度
・食料/燃料/船用品/水の補給の可否
(2)港へのアプローチ
・パイロットステーションの位置を把握し、船舶の輻輳具合を考慮した上で、ブリッジチームの構成(見張り員の増員や船長コールポイント)を計画する。
・なるべく大変針は避けるようにし、顕著な物標による位置の把握がしやすい航路を引く。
・Contingency Anchorage(緊急時などの投錨するエリア)を定めておく
・船体コンディションから、Min UKC(ECDISならばSafety Depth)を計算し、避検線を引く
船舶通航信号所はどこにあるか、利用上注意すべきことは何か
VTSの役割は何か説明せよ
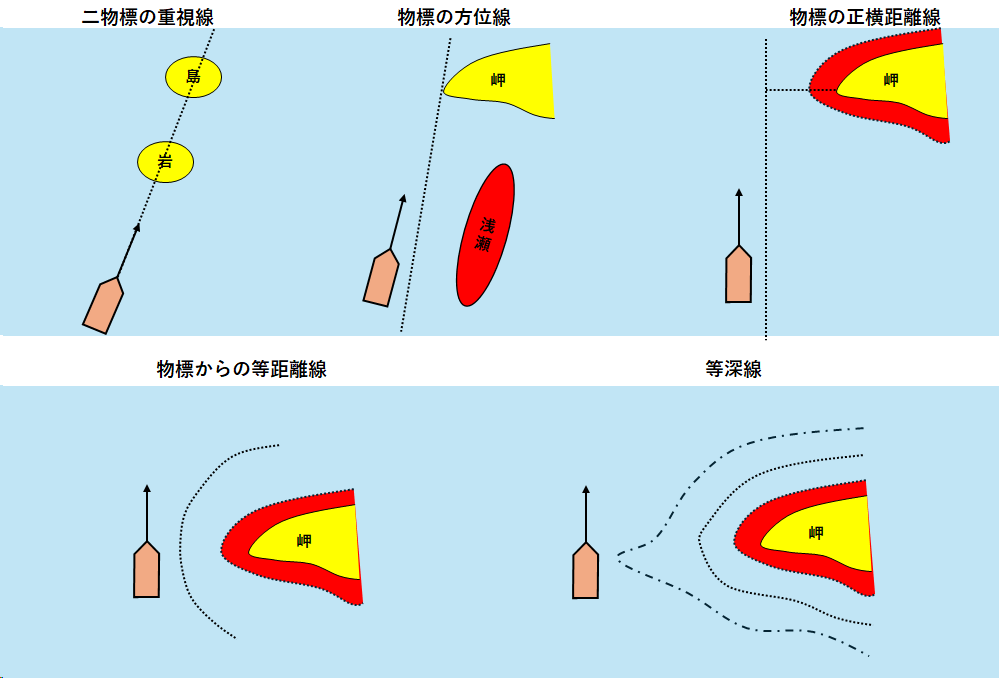
避険線について知るところを述べよ。
<要件>
・海図に記載された位置が確かで、視認が容易なもの
・測定すべき点が容易なもの
・測定方法が容易なもの
<効果>
・危険海面、制限水域の航行また、他船を避航する場合など、不安なく、避検線の限界まで避航することができる。
・狭水道航行など変針が多く、船位を測定する余裕がない場合、避検線によって危険物に対して安全が確保できる。
<注意事項>
・自船の航行状態や船位測定の精度を考慮して、余裕をもって航行する。
・危険水域付近では、なるべく視認が容易で、位置が確実な物標を選定する。
・避検目標と危険水域を結ぶ線が、航路と並行に近い場合は方位線を、航路と直角に近い場合は距離の圏を用いる。
・予備の線も用意しておく。
・自船の針路、速力、喫水、操縦性能や風圧および流圧の影響等の自然条件を考慮する。
・海図の測量精度や船位測定の難しさを考慮する。
・他船を避航する為の余裕水域を考慮する。
・前後左右の変位がただちに判断できる避検目標を選定する。
<種類>
・二物標の重視線
・物標の方位線
・物標の正横距離線
・物標からの等距離線
・等深線
UKCとは何か説明せよ
シンガポール海峡航行中にUKCを設定する順序を説明せよ、喫水制限船かどうかはどういう基準で決定するか
海図記載の水深の誤差はどれくらいあるか
潮汐表による標準港の時間、潮汐高さの誤差はどれくらいか
練習用海図を渡されて「土曜日のお昼頃,海上は平穏で視界良好とします。AからBまで航海する場合、あなたならどのような航海計画(コースライン,変針点等)を建てますか。その場合の注意点を述べよ。
顕著な灯台を船首目標,変針目標に設定,避険線の設定,浅瀬,漁港,漁船,プレジャーボートなどを考慮して作成する。
また、土曜の昼は遊漁船とプレジャーボートが多く出てくることが予想されることも考慮に入れる。
狭水道航行(入港時)に際しての注意事項を述べよ
<航路>
・可航水域のできるだけ中央に航路を引く。水路誌や海図に航路の記載があれば、それに従うのがよいが、反航船の存在を考慮し、航路の中央より右を航行した方が良い場合もあることも留意する。
・大角度変針はできるだけ避ける。
・漁船が多い海域を調査し、可能な限り避ける。
・水道や航路の入り口付近での大角度変針は避け、遠距離からアプローチできるようにする。
・わん曲部では、大角度変針は避ける。複数回の変針で曲がり切れるように航路を引き、船首目標となる重視線や顕著な物標を選定しておく。
<ユーザーチャート・避検船>
・船首目標はできるだけ顕著なものを選ぶ。重視線がとれるものがあればなお良い。
・避検船は分かりやすいものを記載し、本船のMinimum UKCを計算し、その結果得た安全水深(Safety Depth)の等深線を海図上に示す。
・レーダー距離による顕著な物標からの等距離線と方位を記載しておけば、船位の把握に役立つ。
・側壁影響の発生を考慮し、速力を減じて走る箇所を記載しておく。
河川の航海計画を実施する際考慮する事項を述べよ
海水比重の変化による喫水変化について述べよ
浅水海域航行時に於ける注意事項。
・水深と喫水、UKCの関係を考慮し、低潮時~高潮時のどの範囲で航行可能か調査する。本船のコンディションによっては、高潮時にしか航行できない水域があることに留意する。
・トリムはできるだけイーブンキールにする。これは、エコーサウンダーが船首底部のみにしか取り付けられていない場合などで、船首と船尾での喫水差による測定の不安要素をできるだけ排除するためである。
・浅水影響及びバンクエフェクトを考慮し、低速かつ操縦性能を失わない速度で航行する。
・水深の測量精度(ECIDSであればCATAZOC)によっては、海図記載の水深に誤差の範囲があることに注意する。
・コンティエージェンシーアンカレッジ(緊急時に投錨する水域)を定めておく。
推薦航路使用時の利点と注意事項。
<推薦航路とは>
・推薦航路とは、SOLAS条約に基づき、国際海事機関が指定する航路のひとつ。
・海図に、航路の中心線及び航行方向が表示されるほか、航路の西端位置、東端位置及び適用
・海域の範囲を示す位置に、バーチャルAIS航路標識(V-AIS)のシンボルマークが表示されます
<利点>
・地形・海潮流その他自然的条件のみを考慮の上、航海の安全のために水路図誌の発行者が推薦した航路であり、第三者機関(本船乗組員以外の者)による検証がされていること。
<注意事項>
・航路は他船との行会い、横切りなど交通的条件を考慮していないことがあること。
・航路線は航路及び水道の中央と必ずしも一致しないことがある。
・推薦航路はある程度の可航幅をもっているが、それを省略して、1本の標準的な航路線で代表してある。
珊瑚礁海域の航法について
・すぐに減速できるようにS/B ENg.できるようにしておく。
・夜間や視界制限時の航行はできるだけ避ける。
・測量の精度が高くない水域や、最新でない水域があるため、常にエコーサウンダーを使用して水深に注意を払い航行する。
・強い潮流が突然発生することに留意する。
・海面の色によって、ある程度水深の浅い箇所を把握することは可能であるが、最重要は船位の把握と、コースラインからのズレである。船位を頻繁に計測できるよう、事前に顕著な物標を海図上で把握しておく。
・顕著な物標が少なく、クロスベアリングによる測位が難しい海域も多い。レーダーやGPSを活用して、頻繁な船位把握に努める。
航海計画で、日本の港入港前にある区域で一時的な工事のために錨泊の禁止、侵入の禁止等の措置の情報がとられている場合、どのように入手することができるか
基本的な航行警報は、全世界共通でNAVAREA, NAVTEXより入手できる。これはGMDSSの一種で聴取は法定要求である。
日本においては、海上保安庁がHPにて日本航行警報、地域航行警報を公表している。
下記を参照のこと。
海上保安庁, 日本航行警報, 日本航行警報 | 航行警報 | 海上保安庁 海洋情報部 (mlit.go.jp)
瀬戸内海の水源を挙げよ